
洛老师微信
beijing525001
咨询热线
18510803986
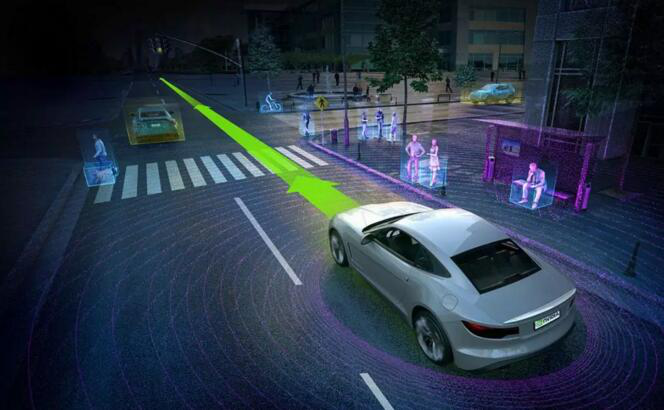
无人驾驶汽车为减少交通事故,优化人类时间结构,节约能源消耗等实际的问题在市场的强烈需求下应运而生。无人驾驶四大核心技术,分别是环境感知、精确定位、路径规划、线控执行。环境感知是其中被研究最多的部分,主要包括三个方面,路面、静态物体和动态物体。对于动态物体,不仅要检测还要对其轨迹进行追踪,并根据追踪结果,预测该物体下一步的轨迹或位置。
无人车对空间环境的感知十分依赖于单线或多线的激光雷达,对交通信号灯及交通标志灯图像信息的采集使用相机来完成,同时应用毫米波雷达等其它传感器共同进行环境信息的采集。各种信息数据的分析与识别使用了多项数据分析与解算方法,并利用人工智能的机器学习手段进行各种目标的识别工作,从而最终完成无人车的环境感知任务。
本课题由中国科学院软件研究所的专业团队指导,学习环境感知与无人驾驶的专业技术,并撰写英文专利。
本次活学生们会在专家带领下,深入学习环境感知与无人驾驶的发展史,及人工智能在该领域的应用进展。运用环境感知与无人驾驶相关技术(conditional Generative Adversarial Networks 、Convolutional Neural Network、Deep Q-Network、Q-Learning、Deep Learning等等),处理实验数据,并撰写英文专利,完成专利申请。
通过小组合作的形式,每个人细致扮演不同的研究角色, 在训练集处理、数据记录、专利撰写等等方面互相协调,通力协作来解决问题。顺利通过的同学,将获得副研究员的个人推荐信。





